











QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

1 、 Projektin yleiskatsaus
Tämän suunnitelman tavoitteena on mukauttaa robotin koulutuskäytäntöalustajärjestelmä vastaamaan yliopiston laboratorion opetustarpeisiin konekisassa ja voimanhallinnassa. Järjestelmä kehitetään AUBO-I5-yhteistyörobotin, Hikvisionin teollisuuskameran, 3D-kameran ja kuuden akselin voima-anturin ympärillä toimintojen, kuten robotinhallinnan, visuaalisen tarkastuksen ja voimanhallinnan kokoonpanon, saavuttamiseksi ja avoimen lähdekoodin ylemmän tietokoneohjelmiston tarjoamiseksi myöhempää toiminnallista laajennusta varten.

2 、 Järjestelmälaitteistokoostumus
Robotti: AUBO-I5-yhteistyörobotin omaksuminen, sillä on korkea tarkkuus ja korkea turvallisuus, ja se sopii opetusskenaarioihin.
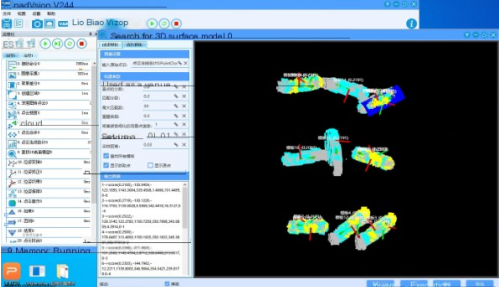
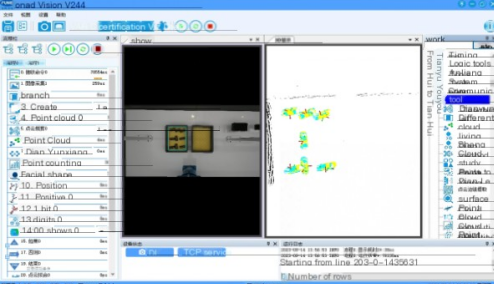
Kamera: Sisältää Hikvisionin teollisuuskamera ja 3D -kamera, jota käytetään työkappaleiden kuvatietojen hankkimiseen, perinteisen kuvankäsittelyn ja syvän oppimisen kuvan havaitsemisen tukemiseen.
Kuuden ulottuvuuden voima-anturi: Kunwei (KWR75) tai muut tuotemerkit valitaan voiman vuorovaikutustietojen reaaliaikaiseen seurantaan robotin lopputuloksen ja työkappaleen välillä.
3 、 Ylätietokonehestyssuunnittelu
Perustoiminnot:
Robotin hallinta: Toteuta toiminnot, kuten yhteys, katkaisu, nivel- tai robotien asennon hallinta.
Kameran hallinta: Toteuta toiminnot, kuten kamerayhteys, katkaisu ja kuvan hankkiminen.
Tilanäyttö: Robotin nivel- ja pose -tilan reaaliaikainen näyttö, kuuden akselin voima -anturin tilaparametrit ja kameran kaappaamat kuvat.
Yksinomaiset ominaisuudet:
Akselireiän kokoonpano: Ylätietokoneen toiminnan kautta yhdistettynä visuaaliseen tarkastukseen ja voimanhallintatekniikkaan saavutetaan akselireiän automaattinen kokoonpanotoiminto.
Rajapinnan suunnittelu: Ylemmän tietokoneen rajapinnan tulisi olla tiivis, selkeä ja helppo käyttää. Rajapinnan tulisi sisältää perustoimintopainikkeet ja tilan näyttöalue sekä pääsy akselireiän kokoonpanotoimintoon.
4 、 Toimintojen toteutus
Koneen visio:
Perinteinen kuvan havaitseminen: Mallien sovittamisen, ympyrän sovittamisen, reunan sovittamisen ja muiden menetelmien käyttäminen työkappaleiden paikantamiseksi ja tunnistamiseksi, viivakoodien, QR -koodien, merkkinumeroiden tunnistamista sekä harmaasävyalueen ja levyn määrän laskemista.
Syvän oppimisen kuvan havaitseminen: Työkappaleiden automaattinen tunnistaminen ja lokalisointi syvän oppimisen algoritmien avulla. Vaikka syvä oppiminen vaatii silti kuvien manuaalista merkintää, pyrimme parantamaan koulutuksen tehokkuutta ja tunnistustarkkuutta vähentämällä vähitellen merkintää.
Tehonohjauskokoonpano:
Yhdistämällä kuuden ulottuvuuden anturien tiedot, saavuta voiman vuorovaikutuksen hallinta robotin päätyefektorin ja työkappaleen välillä ja täydellisen tarkan kokoonpanon akselireiän välillä.
5 、 Projektin riskit ja vastaustoimenpiteet
Yhteistyöriski kuuden akselin voima -anturin kanssa: Yhteistyön puutteen vuoksi kuuden akselin voima -anturin kanssa voi olla tiettyjä teknisiä vaikeuksia ja epävarmuustekijöitä. Järjestämme ammatillisen teknisen tiimin ongelman ratkaisemiseksi ja anturien sujuvan integroinnin ja vakaan toiminnan varmistamiseksi.
Syvän oppimiskuvien havaitsemisen riski: Syvän oppimisen kuvan havaitseminen vaatii tietyn tunnistuksen tarkkuuden ja tehokkuuden, samalla kun täytetään yhden napsautuksen koulutuksen vaatimus. Jatkamme syvän oppimisen algoritmien optimointia tunnistamisen tarkkuuden ja tehokkuuden parantamiseksi tutkimalla samalla tapoja toteuttaa yhden napsautuksen koulutus.
6 、 Laajennuksen jälkeinen ja kohtauksen vaihtaminen
Ylätietokoneohjelmisto omaksuu avoimen lähdekoodin suunnittelun, joka helpottaa toiminnallista laajentumista ja kohtauksen vaihtoa myöhemmässä opetuksessa. Esimerkiksi akselireiän kokoonpanopaikka voidaan vaihtaa tehtäviin, kuten hienojen vaihteiden muuttamiseen tai muiden työkappaleiden tunnistamiseen ja tarttumiseen. Muokkaamalla ja virheenkorjaamalla avoimen lähdekoodin ohjelmia on helppo saavuttaa robottitoiminta ja visuaaliset havaitsemistoiminnot eri skenaarioissa.
Tämä suunnitelma integroi laitteistoresurssit, kuten robotit, kamerat ja kuusi akselin voima-anturia yhdistettynä avoimen lähdekoodin ylemmän tietokoneohjelmiston suunnittelun kanssa, jotta voidaan tarjota rikas ja helposti laajennettava opetusympäristö Robot Education Practice -alustalle. Käytännön alustojen avulla opiskelijat voivat saada syvemmän ymmärryksen koneen näkö- ja voimanhallintatekniikan periaatteista ja sovelluksista sekä parantaa heidän käytännön ja innovatiivisia kykyjään.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
