











QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

Projektin yleiskatsaus
Projektin tavoitteena on suunnitella tehokas ja vakaa kippiautojen automaattinen latausjärjestelmä asiakkaiden lataustarpeiden tyydyttämiseksi Shanxin alueen sisätilojen tuotanto -olosuhteissa. Järjestelmän on saavutettava miehittämätön toiminta ja valvonta ajoneuvojen ajoneuvojen suorittamiseksi vain pisteiden A ja B käsittely- ja automaattisten lataustoimintojen suorittamiseksi tuotantolinjan jatkuvien käyttövaatimusten täyttämiseksi.
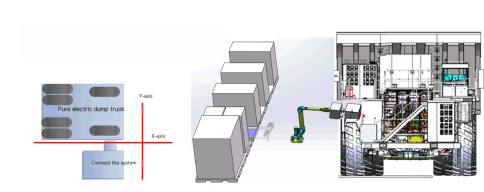
järjestelmäkoostumus
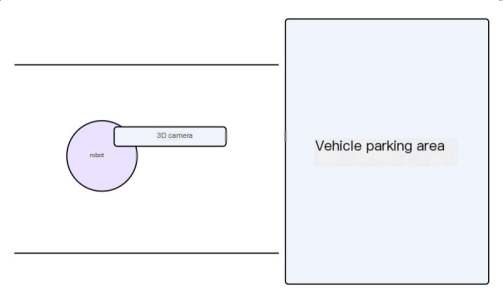
Visuaalinen paikannusjärjestelmä: Hyödyntäminen korkean tarkkuuden kameroiden ja visuaalisten algoritmien hyödyntäminen latausportin tarkan sijoittamisen saavuttamiseksi kippiautoihin. Visuaalisen järjestelmän on oltava kyky vastustaa pölyä ja ohjata auringonvaloa, varmistaen vakaan toiminnan erilaisissa sisäympäristöissä.
Robotit ja aseen työntämismekanismit: Valitaan teollisuusrobotit, joiden käsivarsi on vähintään 3M, varustettu erityisesti suunnitelluilla aseen työntämismekanismeilla. Aseen työntämismekanismissa tulisi olla riittävä työntövoima ja tarkkuus varmistaakseen, että latauspistooli voidaan asettaa tarkasti ja nopeasti latausporttiin.
Latausjärjestelmä: Varustettu suuritehoisilla latauslaitteilla, joissa on 3 megawattia, varmistamalla, että kippiauto voidaan ladata kokonaan lyhyessä ajassa ja parantaa tuotannon tehokkuutta.
Ohjausjärjestelmä: Integroidun ohjausjärjestelmän avulla voidaan saavuttaa visuaalisen paikannuksen tarkan hallinnan, robotin liikkeen ja latausprosessin avulla. Ohjausjärjestelmässä tulisi olla korkeat automaatio- ja älykkyysominaisuudet ja kyetä saavuttamaan miehittämätön automaattinen lataus.
Työnkulku
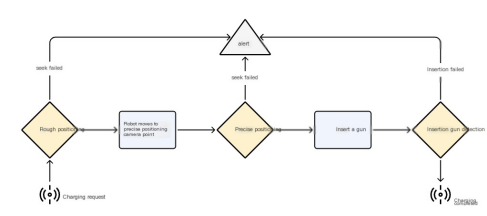
Itsenpoiston kuorma -autojen sijoittaminen: Tunnista ja etsi kippiauton latausporttien sijainti visuaalisen paikannusjärjestelmän läpi.
Robotin liike: Ohjausjärjestelmä ohjaa robottia liikkumaan lähellä kippiauton latausporttia visuaalisen paikannustulosten perusteella.
Aseiden asettamisen työntäminen: Robotti on varustettu työntämällä aseen mekanismia, joka lisää ja nopeasti latauspistoolin kippiauton lataus satamaan.
Latausprosessi: Latausjärjestelmä alkaa ladata kippiautoa, kunnes se saavuttaa esiasetetun tehon tai ajan.
Robotin evakuointi: Kun lataus on valmis, robotti evakuoi latausportin ja odottaa seuraavan kippiauton saapumista.
avaintekniikka
Visuaalinen paikannustekniikka: Käyttämällä algoritmeja, kuten syvää oppimista, visuaalisen paikannusjärjestelmien tarkkuutta ja vakautta voidaan parantaa.
Robotinhallintatekniikka: Optimoi robotin liikkeen etenemissuunta ja nopeus lataustehokkuuden parantamiseksi.
Aseiden työntämismekanismin suunnittelu: Varmista, että aseen työntämismekanismissa on riittävä työntövoima ja tarkkuus ottaen huomioon sen rakenteellinen kompakti ja luotettavuus.
Riskivaste
Sisätilojen ympäristönsuojelu: Varmista puhdas ja kuiva sisäympäristö, vähennä pölyn ja suoran auringonvalon vaikutuksia visuaaliseen paikannusjärjestelmään.
Laitteiden ylläpito: Ylläpitää säännöllisesti ja ylläpitää laitteistoa, kuten robotteja ja visuaalisia paikannusjärjestelmiä niiden normaalin toiminnan varmistamiseksi.
Ammatillinen arviointi: Kutsu ammattilaisia arvioimaan ja optimoimaan aseen työntämismekanismia, latausjärjestelmää jne. Varmistamaan ratkaisun turvallisuus ja toteutettavuus.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
