










QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

Kun valmistusteollisuus kiihtyy suurempaan tarkkuuteen ja tehokkuuteen, tuotantoprosessissa on asetettu suurempia vaatimuksia automaation ja älykkyyden tasolle. Kohdassa monimutkaisten ja erittäin tarkkojen työkappaleiden, kuten inertiaalirenkaiden, perinteiset lastausmenetelmät ovat muuttuneet riittämättömäksi. Tällä hetkellä 3D -visiotekniikan nousu on tuonut vallankumouksellisia ratkaisuja tähän ongelmaan. Se ei vain paranna ruokinnan tarkkuutta huomattavasti, vaan myös parantaa merkittävästi tuotantolinjan joustavuutta ja tehokkuutta.
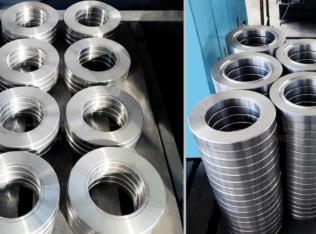
3D-visiotekniikan perusperiaate on käsitellä ja analysoida objektien kolmiulotteista alueellista tietoa tietokoneiden kautta ja saavuttaa toiminnot, kuten esineiden tunnistus, havaitseminen, seuranta ja mittaus. Inertiaalisten renkaiden tarkan ruokinnan soveltamisessa 3D-visiotekniikka kaappaa inertiaalirenkaan kolmiulotteiset alueelliset tiedot tarjoamalla robotti tarkan tarttumisen ja asennon saavuttaen siten tarkka ruokinta inertiaalirenkaan.

Kuvantamisalgoritmien kannalta 3D -visiotekniikka omaksuu edistyneitä algoritmeja selviytyäkseen monimutkaisista tilanteista, kuten pintaheijastuksesta ja öljykalvojen kattavuudesta inertiaalirenkaiden. Optimoimalla algoritmit, järjestelmä pystyy tuottamaan selkeää ja tarkkaa pistepilvitietoa tarjoamalla vankan perustan seuraavaa tunnistamista ja sieppausta varten.
Kameran valinnan kannalta 3D -näköjärjestelmien on valittava kamerat, joilla on korkea resoluutio, suuri näkökenttä ja suuri kenttäsyvyys. Tämäntyyppinen kamera voi kaapata inertiaalirenkaan täydellisen muodon ja kokotiedot varmistaen, että robotti voi löytää kohdeasennon tarkasti tarttumisprosessin aikana. Samanaikaisesti suuren syvyyden ominaisuus antaa kameraa ylläpitää selkeitä kuvantamisvaikutuksia eri etäisyyksillä parantaen edelleen ruokinnan tarkkuutta.

Kuvantamisalgoritmien ja kameran valinnan lisäksi 3D -visiotekniikka on myös integroitava tiiviisti robotinhallintajärjestelmiin. Lähettämällä reaaliaikaisen kolmiulotteisen tilatiedon hitausrenkaan robotin ohjausjärjestelmään, robotti voi löytää tarkasti hitausrenkaan sijainnin ja suorittaa tarttumisen. Tämä reaaliaikainen tiedonvaihto antaa roboteille mahdollisuuden säätää nopeasti tarttumisstrategioitaan, kun kohtaavat erilaisten eritelmien hitausrenkaita saavuttaen joustavan tuotannon.
3D -visiotekniikalla on ollut tärkeä rooli tarkalla inertiaalirenkaiden ruokintaprosessissa. Optimoimalla kuvantamisalgoritmit, valitsemalla sopivia kameroita ja yhteistyötä tiiviisti robotinohjausjärjestelmien kanssa, tämä tekniikka saavuttaa tehokkaan ja tarkan tarttumisen inertiaalirenkaiden, parantaa tuotannon tehokkuutta ja vähentää tuotantokustannuksia.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
