






![Uudet tuotteet] FGS-22 -värianturi: Pitkän matkan havaitseminen + Älykäs ravistamisenesto, avaamalla uuden teollisuuden värin tunnistamisen ulottuvuuden!](/upload/7597/2025060516280199525.jpg "Uudet tuotteet] FGS-22 -värianturi: Pitkän matkan havaitseminen + Älykäs ravistamisenesto, avaamalla uuden teollisuuden värin tunnistamisen ulottuvuuden!")




QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

Nykyaikaisessa tuotantoteollisuudessa, joka pyrkii tehokkuuteen, tarkkuuteen ja automatisointiin, CNC -koneistustekniikan soveltaminen on yhä laajemmin levinnyt. CNC -työstötyökalujen lastaus- ja purkamisprosessista tulee kuitenkin usein pullonkaula, joka rajoittaa tuotannon tehokkuutta. Tämän rajoituksen voittamiseksi Fuweii Intelligent on käynnistänyt komposiittirobotin CNC: n automaattisen lastaus- ja purkamisratkaisun, tuotantoprosessin muuttamisen ja tuotannon tehokkuuden ja joustavuuden parantamisen.
Projektin yleiskatsaus
Projektin tavoitteena on saavuttaa raaka -aineiden automaattinen lastaus ja purkaminen CNC -koneistuksen aikana sekä välttämättömät tarkastus- ja puhdistusprosessit. Esittelemällä komposiitti AGV (automatisoitu opastettu ajoneuvo) robottivarsijärjestelmä yhdistettynä skannauskameroihin ja paikannusvisiokameroihin, voidaan saavuttaa tarkka ja tehokas materiaalin käsittely ja prosessien hallinta.
Järjestelmäkoostumus
Yhdistelmä AGV -robottivarsijärjestelmä: Sisältää avainkomponentit, kuten AGV -runko, robottivarsi, skannauskamera, paikannuskamera jne.
Ohjausjärjestelmä: Vastuu tehtäväsignaalien vastaanottamisesta ② -alueen laitejärjestelmästä, AGV -robottivarsijärjestelmän hallitsemisesta toimien, kuten materiaalien tarttumisen, käsittelyn ja sijoittamisen, suorittamiseksi.
Skannausjärjestelmä: Skannaamalla Material -lokeron QR -koodi skannauskameralla, materiaalitiedot voidaan kirjoittaa ja seurata.
Paikannusjärjestelmä: AGV -robottivarsijärjestelmien tarkan sijoittamisen ja navigoinnin paikannuskameroiden hyödyntäminen.
Työnkulku
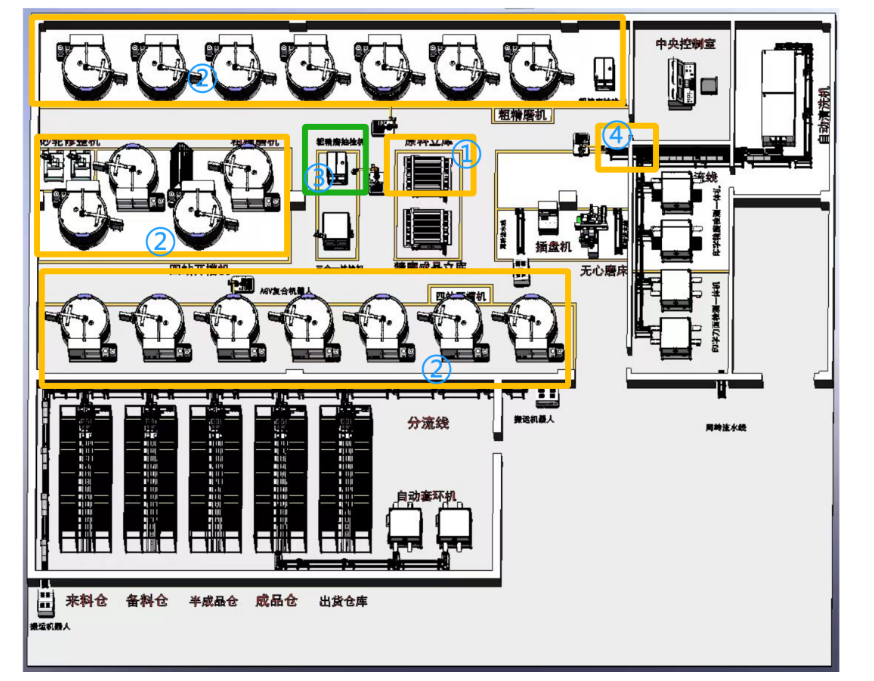
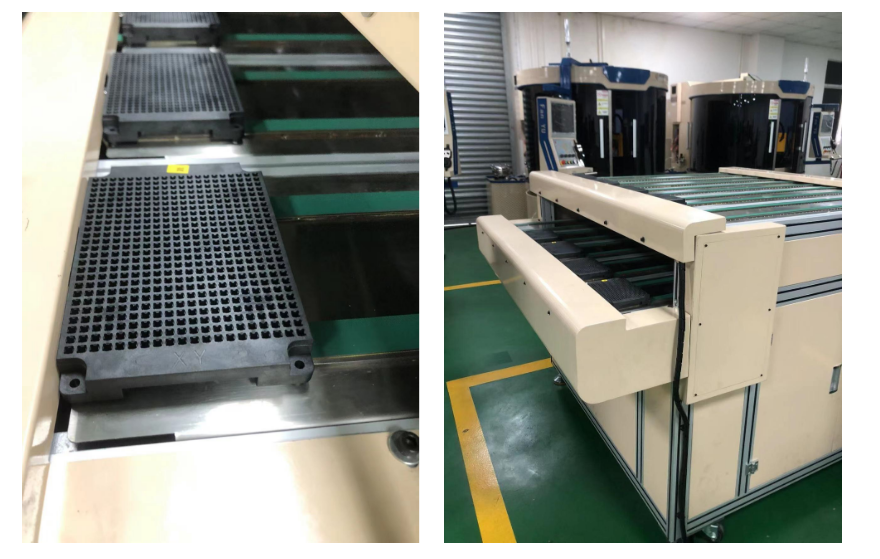
Raaka -aineiden tarttuminen: Komposiitti AGV -robottivarsijärjestelmä menee raaka -aineiden varastointiin ensimmäiseen kerrokseen tarttuaksesi käsitettäviin materiaaleihin ohjausjärjestelmän ohjeiden mukaisesti.
Käsittelymenettely: Toimita kaapatut materiaalit koneeseen alueella ②, aseta ne koneen sisäisen sijoitusasennon mukaan ja odota käsittelyä.
Testausprosessi (valinnainen): Jos järjestelmä antaa testauspyyntöä, lähetä muotilevy koneen testipaikasta alueella ② testauslaitteiden testilaitteiden sijoitusalueelle ③ testausta varten. Kun tarkastus on valmis, lähetä muotilevy takaisin koneeseen alueella ②.
Puhdistusprosessi: Aseta laitteiden käsittelemät materiaalit alueen ② puhdistuskoneen kuljettimen linjalle alueella ④, ja materiaalinpuhdistustyö suoritetaan automaattisesti kuljetinlinjalla.
Tekninen toteutus
Composite AGV -robottivarsijärjestelmä: Edistyneen AGV -tekniikan ja robottivarren tekniikan omaksuminen tehokkaan ja tarkan materiaalinkäsittelyn saavuttamiseksi.
Skannausjärjestelmä: Korkean suorituskyvyn skannauskameroiden käyttäminen materiaalitietojen tarkan tulon ja seurannan varmistamiseksi.
Paikannusjärjestelmä: Edistyneen visuaalisen paikannustekniikan hyödyntäminen AGV -robottivarsijärjestelmien tarkan sijoittamisen ja navigoinnin saavuttamiseksi.
Ohjausjärjestelmä: Luotettavan ohjausjärjestelmän käyttöönotto koko järjestelmän vakaan toiminnan ja tehokkaan yhteistyön varmistamiseksi.
Järjestelmän edut
Korkea automaatiotaso: automaattisen lastauksen ja raaka -aineiden havaitsemisen ja puhdistamisen toteuttaminen CNC -koneistusprosessissa, tuotannon tehokkuuden parantaminen.
Suuri tarkkuus: Käyttämällä skannauskameroita ja visuaalisten kameroiden sijoittamista, voidaan saavuttaa materiaalitietojen tarkka syöttö ja tarkka sijoittaminen.
Vahva joustavuus: Työnkulkua voidaan säätää joustavasti todellisten tarpeiden mukaisesti erilaisten tuotantovaatimusten täyttämiseksi.
Vahva jäljitettävyys: Käyttämällä skannausjärjestelmää materiaalitietojen seuraamiseen ja jäljittämiseen koko prosessin ajan tuotteen laadunhallinnan tasoa voidaan parantaa.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
