










QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

Projektin tausta:
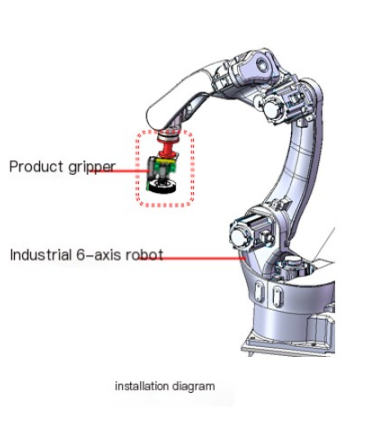
Teollisuusautomaation nopean kehityksen myötä yhä useammat yritykset pyrkivät päivittämään tuotantolinjansa ottamalla käyttöön älykästä robottitekniikkaa. Niistä Fuwei Intelligent käyttää 2D -visiota robotin ohjaamiseen pyöreän liikkeen suorittamiseen, mikä ei vain parantaa tuotannon tehokkuutta, vaan myös vähentää työvoimakustannuksia ja parantaa tuotteiden laatua. Tämän ratkaisun tavoitteena on luoda erittäin automatisoidun vähentävä prosessin älykäs tuotantolinja.

Projektin vaikeus:
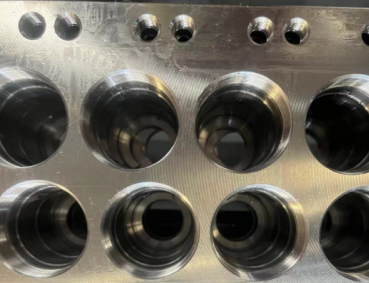
Eri työkappaleissa voi olla eroja muodossa, tekstuurissa, valaistusolosuhteissa jne., Jotka vaativat suurta visuaalista paikannustarkkuutta;
Robottien on suoritettava ympyräliikenteen etenemissuunnittelujen suorittamiseksi, mikä edellyttää robotinohjausjärjestelmää voidakseen laskea ja säätää liikkeen etenemissuunta reaaliajassa;
Kulkeutumisen laatu vaikuttaa suoraan tuotteiden laatuun ja tuotantolinjan tehokkuuteen. Tehokkaan ja vakaan deburring -prosessin saavuttaminen, välttämällä työkappaleen vaurioita tai jättämällä jäännösurut, on avainkysymys, jota on puututtava projektissa.
Ratkaisu:
1. Suorita muunnossuhde tuotteen sijainnin ja tuotteen sijainnin välillä robotin koordinaattijärjestelmässä "käsisilmien kalibroinnin" kautta;
2. Käyttämällä visuaalista ohjausta tai robotti -opetuspisteitä kamera voi kaapata kuvia esineen eri pinnoille;
3. Kuvan vääristymien korjausalgoritmien käyttäminen eri kulmien ampumisen aiheuttamien kuvamuutosten saavuttamiseksi;
4. 2D -kameran tunnistus tuotereiän asennoista;
5. Luo neljä koordinaattipistettä reikän asennon perusteella;
6. Robotti vastaanottaa neljä koordinaattipistettä;
7 Robotti yhdistää neljä pistettä sekvenssissä "ympyräliikkeen" komennon kautta pyöreän reiän risteilyn suorittamiseen;
Korkeat arvot:
Tämä ratkaisu integroi 2D-visiojärjestelmän, tarkan robotin, laskemistyökalujen ja älykkäiden ohjausjärjestelmien tarkan tunnistamisen, sijoittamisen ja työkappaleiden automatisoidun vähentämisen saavuttamiseksi. Robotti suunnittelee automaattisesti ja suorittaa pyöreän liikkeen etenemissuunnan, joka perustuu 2D -visiojärjestelmän tarjoaman työkappaleen sijainti- ja asentotietoihin, jotka ovat suorittaneet vähentävän tehtävän.
Deburring -prosessin automaatiopäivitys on saavutettu integroimalla 2D -visiojärjestelmä, robottijärjestelmä ja älykäs ohjausjärjestelmä. Tämä ratkaisu ei vain paranna tuotannon tehokkuutta ja vähentää työvoimakustannuksia, vaan myös parantaa tuotteiden laatua ja tuotantolinjan turvallisuutta.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
