



")







QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

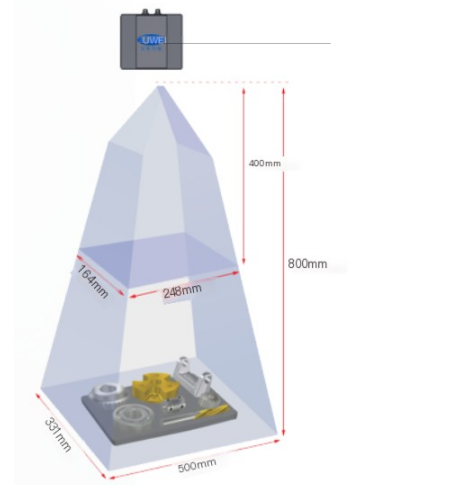
Automaattisessa kokoonpanolinjassa alumiiniseoksen ohutlevyjen prosessointiin syöttölaitteen sijoittamisen tarkkuus vaikuttaa suoraan tuotteen lopulliseen laatuun ja tuotantotehokkuuteen. Kuinka varmistaa, että syöttölaite voi sijoittaa työkappaleen tarkasti kiireiseen tuotantolinjaan tarkoitettuun asemaan, on tullut suuri haaste meille. Nykyään paljastamme 3D -visuaalisen ohjausratkaisumme, joka varmistaa syöttölaitteen sijoittamisen tarkkuuden saavuttamisen ± 2 mm: n näkökulman leveyden ollessa 1500 mm ja kameran tarkkuus 20 miljoonaa.

1 、 Korkea tarkkuus 3D -visiojärjestelmä
Ensinnäkin ratkaisumme hyväksyy tarkkaan 3D-visiojärjestelmän. Tämä järjestelmä käyttää nopeaa kameroita ja edistyneitä kuvankäsittelyalgoritmeja reaaliaikaisten työkappaleiden tietojen keräämiseen tuotantolinjalla ja 3D-rekonstruoinnin suorittamiseen. Näkymän leveydessä 1500 mm järjestelmämme pystyy selvästi tunnistamaan työkappaleen kaikki yksityiskohdat tarjoamalla tarkkaa tietotukea seuraavaa sijoitusta varten.
2 、 Älykäs algoritmin optimointi
Pelkästään tarkkaan visuaalisiin järjestelmiin luottaminen ei kuitenkaan riitä. Materiaalin sijoittamisen tarkkuuden varmistamiseksi ± 2 mm: n on myös optimoitava algoritmi. T & K -tiimimme on tehnyt tarkkoja säätöjä ja optimointeja eri näkökohtiin, kuten visuaalisen tunnistuksen, polun suunnitteluun ja robotin hallintaan laajojen kokeiden ja tietojen analysoinnin avulla.
Visuaalisen tunnustamisen kannalta olemme ottaneet käyttöön edistyneiden ominaisuuksien uuttamis- ja sovitusalgoritmit, jotka pystyvät tarkasti tunnistamaan työkappaleen sijainnin ja asennon. Polun suunnittelussa tarkastellaan erilaisia tekijöitä, kuten robotin liikkeen etenemissuunta, työkappaleen muotoa ja kokoa jne. Varmistaaksemme, että robotti voidaan sijoittaa optimaaliseen polkuun. Robotin hallinnan kannalta käytämme korkean tarkkuuden servomoottoreita ja ohjaimia varmistaaksemme, että robotti voi liikkua esiasetetun polun ja nopeuden mukaan.
3 、 Reaaliaikainen palaute ja säätö
Lisäksi järjestelmällämme on myös kyky antaa reaaliaikainen palaute ja säätö. Robotin sijoitteluprosessin aikana järjestelmämme tarkkailee jatkuvasti työkappaleen sijaintia ja asentoa reaaliajassa ja syöttää valvontatulokset ohjausjärjestelmään. Jos todellisen sijoitusasennon ja esiasetetun asennon välillä on poikkeama, ohjausjärjestelmä hienosäätää robottia välittömästi sen varmistamiseksi, että lopullinen sijoittamisen tarkkuus saavuttaa ± 2 mm.
3D -visuaalisen ohjausratkaisumme avulla olemme onnistuneesti parantaneet syöttölaitteen sijoittamisen tarkkuutta useissa alumiiniseoksen ohutlevyjen käsittelyyrityksissä. Käytännöllisissä sovelluksissa järjestelmämme ei vain paranna tuotannon tehokkuutta, vaan myös vähentää vikavauhtia, mikä tuo yritykseen konkreettisia taloudellisia etuja.
Yhteenvetona voidaan todeta, että 3D-visuaalinen ohjausratkaisumme on onnistuneesti parantanut syöttölaitteen sijoittamisen tarkkuutta alumiiniseosten prosessoinnissa erittäin tarkkailun visuaalisten järjestelmien, älykkään algoritmien optimoinnin ja reaaliaikaisen palautteen ja säädön avulla. Jatkamme tulevaisuudessa ratkaisujemme optimointia ja parantamista, mikä tuo tehokkaampia ja tarkempia automatisoituja prosessointiratkaisuja useammille yrityksille.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
