











QR koodi

Meistä
Tuotteet
Ota meihin yhteyttä

Puhelin

Sähköposti

Osoite
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina

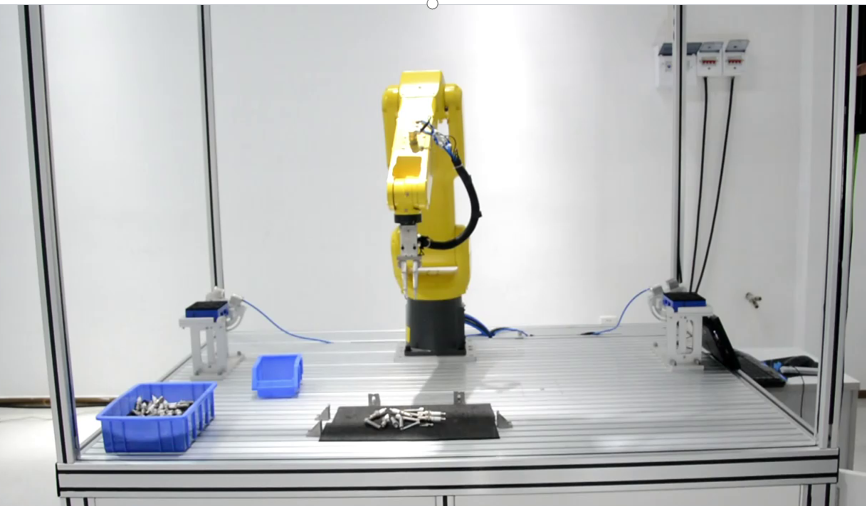
Valmistusautomaation jatkuvan parantamisen myötä suuri autojen osat ovat ehdottaneet, että tarve käyttää komposiittirobotteja pultin lajittelun loppuun saattamiseksi tuotannon tehokkuuden parantamiseksi ja työvoimakustannusten vähentämiseksi. Fuwei Intelligent käyttää komposiittirobotteja yhdistettynä 3D-teollisuuskameroihin ja korkean suorituskyvyn ohjaimiin automaattisen pultin tarttumisen saavuttamiseksi parantaen siten tuotantolinjan yleistä toiminnan tehokkuutta.
Projektivaikeudet
1. Korkeat tarkkuusvaatimukset: Pultit ovat pieniä komponentteja, jotka vaativat robotteja tunnistamaan ja vakaasti tarttumaan tarkasti, välttäen tuotevaurioita tai tuotantolinjan seisokkeja.
2. Robottien on mukauduttava dynaamisiin tekijöihin, kuten eri hyllyasentoihin ja tarttumispisteiden muutoksiin.
3. Ainesosien tarkkuuden varmistamiseksi on tarpeen optimoida robotin toimintaprosessi ja parantaa yleistä toiminnan tehokkuutta.

Ratkaisu
Hyödyntämällä 3D-teollisuuskameroita ja korkean suorituskyvyn ohjaimia, robotit voivat löytää tarkasti pulttikomponentit ja säätää tarttumisstrategioita reaaliajassa visuaalisen tunnistamisen avulla varmistaen vakauden ja tarkkuuden.
Fuwein älykäs integroitu ohjain kerää työpaja -signaaleja saumattoman integraation saavuttamiseksi robottien ja tuotantolinjojen välillä. Moni -akselin samanaikainen ohjaus, suuntauksen joustava säätö materiaalitelineen muutosten ja tarttuvien pisteiden mukaisesti, mukautuen dynaamisiin ympäristöihin.
Optimoi kotitehtäväprosessi, vähentää odotusaikaa ja paranna tarttumisen tehokkuutta. Aseta kohtuullinen kotitehtävien jakso ja säädä tarttumisen ja kokoonpanon määrää kysynnän mukaan vastaamaan tuotantolinjan todellisia tarpeita.
Toimintaprosessi:
Saatuaan materiaalin tarttumispyynnön, komposiitirobotti alkaa siirtyä nimettyyn tuotekannoon. Seuraavaksi robotti suorittaa visuaalisen paikannuksen varmistaakseen tuotteen tarkan tunnistamisen ja tarttumisen. Jos järjestelmä havaitsee paikannusprosessin aikana, että tuotteiden lukumäärä on pienempi kuin asetettu arvo, se laukaisee hälytyksen ja yrittää sijoittaa uudelleen. Jos paikannus on onnistunut, robotti jatkaa tarttumista; Jos paikannus epäonnistuu, se siirtyy seuraavan tuotteen sijaintiin ja yrittää uudelleen. Onnistuneen tarttumisen jälkeen robotti siirtää tuotteen purkamisalueelle purkamisoperaation loppuun saattamiseksi. Koko prosessin ajan visuaalinen paikannus ja tarttuminen ovat keskeisiä vaiheita, jotka varmistavat, että robotti pystyy suorittamaan tehokkaasti ja tarkasti lastaus- ja purkutehtävät.
Tekniset edut:
Voi sopeutua ympäristövalaistuksen rajuihin muutoksiin ja korvata käsityöt;
Älykäs robottivarren esteiden välttäminen ja etenemissuunnittelun algoritmi, joka perustuu syvän oppimiseen esineiden havaitsemiseksi ja lokalisoinnille;
Voi sopeutua skenaarioihin, joissa useita työkappaleita tuotetaan samanaikaisesti.
Korkeat arvot:
Vähennä kustannuksia ja lisää tehokkuutta, parantaa vakautta, laittaa nopeasti tuotantoon yksinkertaisella toiminnalla ja sopeutua nopeasti uusiin tuotteisiin.
Tämä suunnitelma parantaa merkittävästi tuotantolinjan toiminnan tehokkuutta. Samaan aikaan tarkan sijoitus- ja tarttumistekniikan avulla tuotevaurioiden ja tuotantolinjan seisokkien riski voidaan vähentää, mikä parantaa tuotteiden laatua ja tuotannon vakautta. Lisäksi sopeutumiskyky dynaamisiin ympäristöihin ja tehokas vauhdinhallinta parantaa entisestään tuotantolinjan joustavuutta ja vasteen nopeutta tyydyttäen GAC Toyota jatkuvasti muuttuvat tuotantotarpeet.
Nro 22, Hongyuan Road, Guangzhou, Guangdongin maakunta, Kiina
